Robots are similar to computers. Like a computer, which is an electronic device that is programmed to perform certain tasks, an industrial robot, being an electromechanical machine, is also a reprogrammable, multi-purpose device to executes a set of instructions automatically.
ISO asserts that an industrial robot being manipulative has multiple reprogrammable axes which are either fixed in place or made mobile depending on a specific industrial automation need for which it is designed.

The design and configuration of a robot varies from application to application. For example, a robot designed for spray painting would be a lightweight robot to carry a paint spray gun in comparison to the one which is tasked to stack cement bags one upon another in a lorry and, therefore, would be heavier in weight and sturdier in construction with long robotic arms and fewer articulations.
The present article is dedicated to discussing the main components of a robot system that virtually all industrial robots share.
Elements of an Industrial Robot
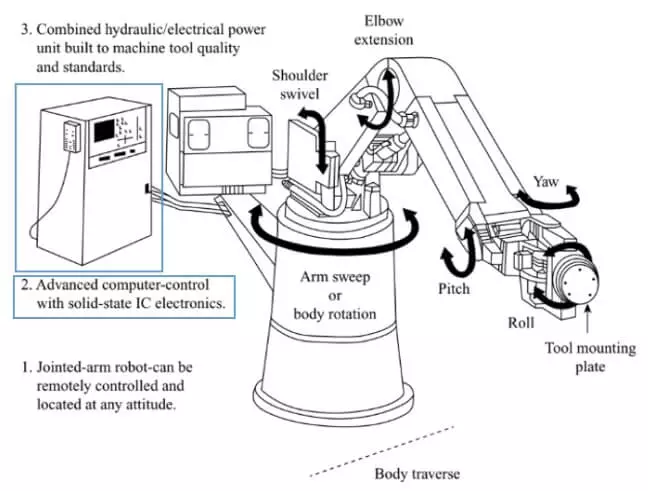
The figure shown below illustrates a robot system that consists of certain key components of which it is made. It mainly consists of a manipulator, end effectors, sensors, and actuators, as well as a controller, processor, and power supplies.
Let’s discuss each robot element one by one.
Manipulator or Rover
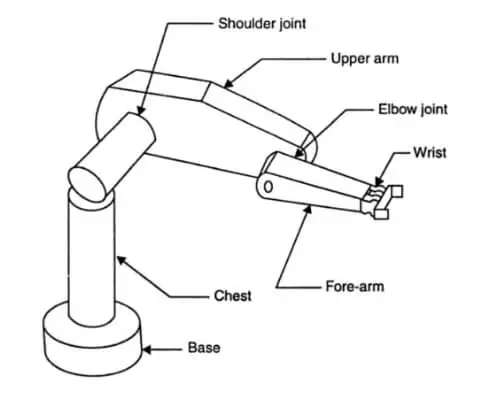
It is the main body of a robot. It consists of links, joints, and other structural elements, without which a manipulator alone does not make a robot. In the diagram shown above, the chest, upper arm, and forearm act as links, whereas the shoulder, elbow, and wrist are joints, and lastly, the body behaves as a base of the manipulator.
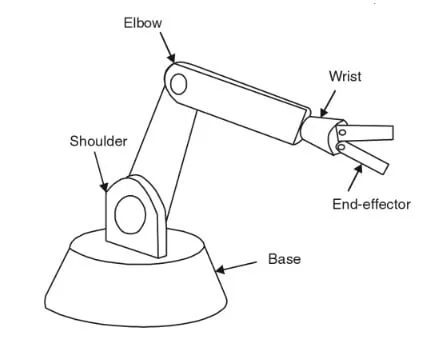
End Effectors
It is a very important part of a robot as it is connected to the last part (joint) of a robot called the hand. It helps in handling the objects for which it is designed. Also, it is the part of a robot that is in contact with the machine or is tasked to perform the assigned duties by interacting with the outer world. A robotic arm with an end effector is shown in the figure below.
Robot manufacturers do not produce or sell end effectors. All they provide is simply the grippers. Robot’s arms have the provision for connecting with the end effectors. It is the task of the company’s automation engineer to design end effectors or grippers as per the company’s operational needs.
The difference between a gripper and an end effector is that the former is used to hold objects while the latter is a general term in which the gripper is just one part. End effectors other than grippers may include cutting tools, welding torches, spray guns, sensors, cameras, drills, and beyond.
In most of the cases, the function of the end effectors is controlled by the robot’s controller. However, in other configurations, the robot’s controller interacts with the end effector’s controlling device for electronic communication.
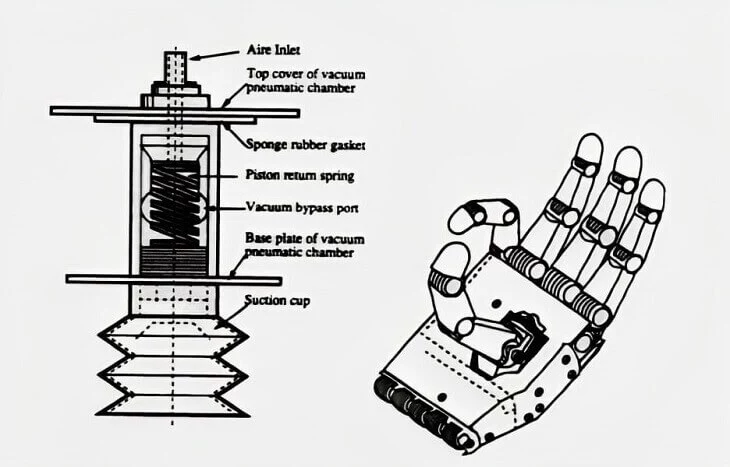
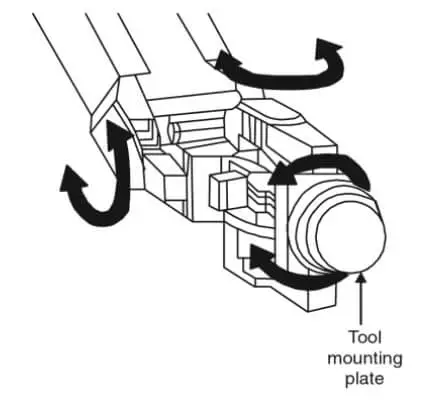
The figure below shows a mounting plate that acts as an interface between the controller and the end effector.
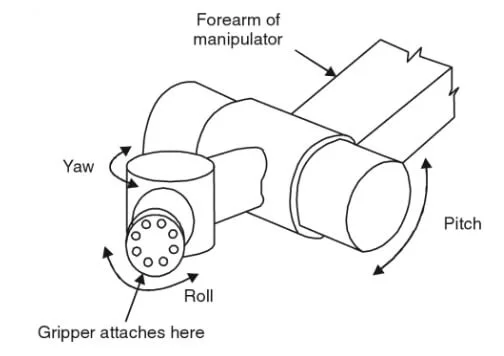
Another schematic diagram clearly illustrated below shows the position where a gripper attaches to the robot.
Actuators
These are the devices in a robot responsible for its mechanical or physical motion. They are sometimes called the robot’s muscles. They convert electrical, mechanical, or hydraulic energy into mechanical motion so that a robot may interact with its surrounding environment.
An actuator may be of electrical, mechanical, or hydraulic type. Its most common forms include servo motors, stepper motors, pneumatic cylinders, hydraulic cylinders, and others.
Sensors
Robots are equipped with two types of sensors.
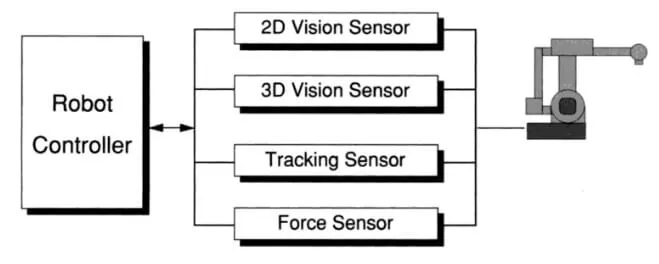
One is called the external sensory device responsible for taking information from the outside world. They may include vision sensors, speech synthesizers, and touch and tactile sensors, among many others (Figure above).
The other is known as the robot’s internal sensors that keep it (the robot) informed about its internal state of affairs, that is, about the position of its arms and legs (for instance) to know the current state of its configuration.
Similar to humans in which the feedback sensors in the central nervous system are embedded in the body’s muscle tendons and send information back to the brain, which then reads the message and identifies with it, the internal sensors work on the same pattern as they continuously inform the robot’s controller about the position of its arms, legs and other elements to ensure its configuration at present.
Precisely, the position sensors used in a robot may include potentiometers, encoders, linear variable differential transformers (LVDT), resolvers, and time-of-travel displacement sensors among others.
Whereas the velocity sensors may be such as tachometers, encoders, and differential of position signal-type. Similarly, for pressure and force, piezoelectric, force sensing resistors and strain gauges may be used depending upon the operational requirement. Proximity sensors may be of magnetic, optical, ultrasonic, inductive, capacitive, and eddy current types in a robot.
Other sensors in a robot may include acceleration sensors, torque sensors, micro-switches, light and infrared sensors, touch and tactile sensors, vision sensors, speech synthesizers, remote central compliance (RCC) devices, and so forth.
Controller
The controller, as its name implies, controls the motion of a robot. Its human counterpart is the cerebellum, which coordinates the mind with the body. A controller in a robot receives data from the computer, gives commands to the actuators for taking necessary action, and receives sensory data sent by the sensors positioned at various locations/points in a robot.
Take an example. It is required by an industrial robot to pick up a part from a machine with the angular position of its first joint at 45 degrees. Suppose the robotic arm’s first joint is not positioned at 45 degrees. In that case, the controller will immediately send a signal to the actuator in the form of a small current to an electric motor or air to a pneumatic cylinder or a signal to a hydraulic servo valve, thereby commanding it to reposition the arm (or a joint) as programmed.
The first joint, which is equipped with a position sensor (or a potentiometer), would send the change in the joint angle to the controller. Upon measuring it against the preset value, if the arm has reached its desired angular position, the supply to the actuator is stopped, thereby halting its operation where it is.
Processor
It is known as the brain of a robot that does all the arithmetics used in the motion of the remote joints. More precisely, a robot’s processor not only determines how much and how fast the robot arm would move to reach its set position at the required speed, but it also oversees the coordinated actions between the sensors and a controller, unlike a computer’s processor, which is a multi-tasker, a robot’s processor is solely designed to perform one specific function.
So, what does a robot’s processor require to perform its intended function? It requires an operating system, programs, and peripheral devices (like a computer), among many others. It has, of course, certain limitations similar to those of a PC processor.
It is noteworthy that although the processor and controller are packed in the same unit as one, they have separate functions to perform.
Software
Generally, a robot has three types of software as follows:
- One is known as the operating system that operates the computer.
- The second is the robot’s unique software, which performs the necessary mathematics to resolve the kinematic equations of the robot based on which its joint moves. The results thus calculated are fed to the controller.
The third consists of a collection of routines or application programs whose sole purpose is to use peripheral devices such as vision routines and others.
Explanation of a Complete Robot System
For a better understanding, a robotic system with all its components mentioned above is shown to have integrated into a block diagram in the figure illustrated below.

A robotic system consists of a mechanical structure (consisting of a body, joints, links, base, and others), a controller (robot computer), actuators, and sensors. A robot has electrical actuators such as an electric motor (AC/DC type) for rotary operations, whereas pneumatic and hydraulic actuators are for linear actuation.
The power required by a robot is the total of the power needed by all the actuators. It has internal sensors for sensing required elements such as the motor’s rpm. An end effector may be a tool or a gripper, depending on the given operational need.
The mechanical structure stated above is interfaced precisely with the robot controller. The controller consists of a robot computer in which different software is installed which are used to regulate the function of a robot.
Moreover, a robot has an internal operating system called a processor to operate its internal electronics and connect peripheral devices such as keyboards, disc drives, mass storage, and so on.
I am the author of Mechanical Mentor. Graduated in mechanical engineering from University of Engineering and Technology (UET), I currently hold a senior position in one of the largest manufacturers of home appliances in the country: Pak Elektron Limited (PEL).